AED 124.95
Low stock
1
Description
The Romeo Mini ESP32-C3 Robot Control Board is a compact and integrated motor driver development board designed for robotics projects. It features an onboard ESP32-C3 module that offers dual-mode communication via Wi-Fi and Bluetooth 5. The board supports an IPS TFT display screen and provides two control schemes for servos and motors. With 9 IO interfaces compatible with the Gravity standard, it can connect to various sensor modules, making it an ideal choice for robotics and automation applications.
Features
- Integrated Motor Driver Development Board: Combines main control, Wi-Fi, Bluetooth 5, and motor driver functionalities.
- Compact Size: Small form factor for easy integration into various projects.
- IPS TFT Display Support: Compatible with IPS TFT display screens for visual feedback and project information display.
- Versatile Control Schemes: Supports both servo and motor control options.
- Gravity Standard Compatibility: 9 IO interfaces that are compatible with Gravity sensor modules.
- Stable Power Supply: Servo interface provides stable power for servos and high-current devices.
- GDI Interface: Built-in interface for connecting an IPS display screen.
Specifications
Parameters:
- Main Control Chip: ESP32-C3-MINI-1
- Type-C Input Voltage: 5V
- VIN Input Voltage: 5-15V
- Motor Output Current: 1.7A continuous drive current per channel
- Servo Input Voltage: 5-12V
- Module Size: 47x38.5mm
Interface Pins:
- Digital I/O: 4 pins
- Analog I/O: 3 pins
- UART: 1 pin
- I2C: 1 pin
- Motor: 2 pins
- GDI: 1 pin
- Type-C: 1 pin
Pinout:
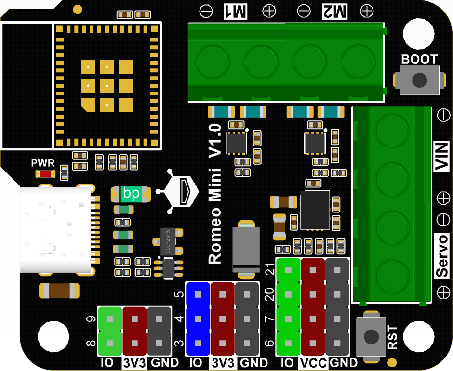
| Name | Function Description |
|---|---|
| VIN | Power input for motor driver and controller: 5-15V. This port must be connected for M1/M2 motors to work. |
| Servo | Power input for digital ports: 5-12V. If using high-current peripherals with voltage higher than 5V on digital output port (VCC end), connect to this interface to avoid damaging the Type-C USB port. |
| M1/M2 Ports | Two motor control ports: |
| M1: GPIO1 (direction control), GPIO0 (PWM control) | |
| M2: GPIO10 (direction control), GPIO2 (PWM control) | |
| I2C | Standard I2C interface: SDA (8), SCL (9), VCC (3.3V), GND |
| A-3.3V-GND | Standard analog interface: |
| A (blue): analog ports 3, 4, 5 | |
| 3.3V (red): power supply positive terminal | |
| GND (black): power supply negative terminal | |
| D-VCC-GND | Standard digital interface: |
| D (green): digital ports 6, 7, 20, 21 | |
| VCC (red): power supply positive terminal (When the Servo port is not powered, VCC is 5V; when the Servo port is powered, VCC is the input power for the Servo port.) | |
| GND (black): power supply negative terminal | |
| UART | RX (20), TX (21), VCC (5V), GND |
| Note: The UART interface shares two IO ports with servo ports, so UART cannot be used when servos are used. | |
| RST | Controller reset button |
| BOOT | Controller download button |
Application:
- Robot Motors Controller: Ideal for controlling motors in robotic applications.
- Servos Controller: Suitable for managing servo motors in various projects.
- IoT Devices: Can be used in IoT applications requiring wireless communication and motor control.
- Automation Projects: Perfect for automation tasks that need precise motor and servo control.
- Educational Projects: A great tool for learning and teaching about robotics, IoT, and motor control.
Documents:
Package Includes:
- Romeo mini Control Board(ESP32-C3) x1