Out Of Stock
1
Description
This board integrates a half-duplex circuit, connecting the transmit wire from the UART to all AX-12 servos. This allows a command sent over the wire to be heard by all servos, but only the servo with a matching ID processes it. The servo can be linked by a serial bus, accommodating up to 200+ servos. It provides feedback on position, rotation velocity, torque, current, and motor temperature. With capabilities for all-round rotation and velocity control, it functions as a gear motor, suitable for wheeled robots or tracked robots.
Application:
- Education
- Robot Arm
- Humanoid Robot
- Hexapod Robot
- Any other servo-driven application
Specifications:
- MCU: Atmega8
- Power Supply: 6.5-12V
- Compatible with Arduino R3
- SPI interface with Arduino (Digital 10,11,12,13)
- User-friendly for primary users
- UART interface for deeper development
- 7 channels for servo connection
- Half-duplex circuit inside
- Board surface: Immersion Gold
- Size: 59x53mm
Pin Out:
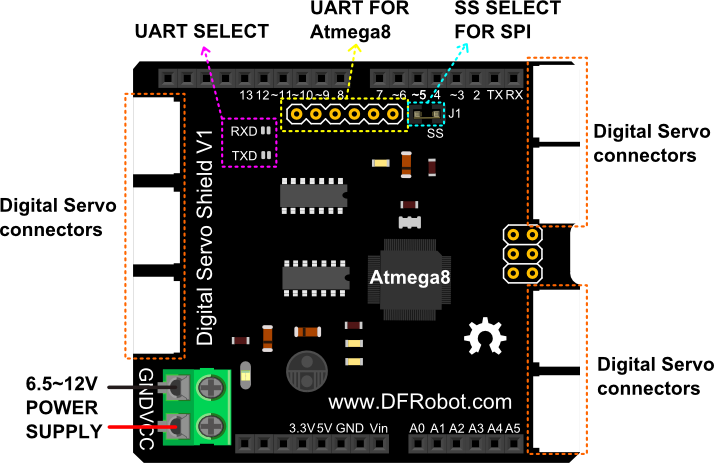
More Details:
- Power Supply: 6.5~12V power supply for servos & the whole system.
- UART Select: UART is already shorted by solder. Remove solder when using UART for Atmega8.
- UART for Atmega8: UART interface for deeper development. Program the Atmega8 with FTDI. Choose "Arduino Optiboot8".
- SS Select for SPI: Digital pin 10 by default. Remove the jumper cap to use other digital pins.
Connection Diagram: 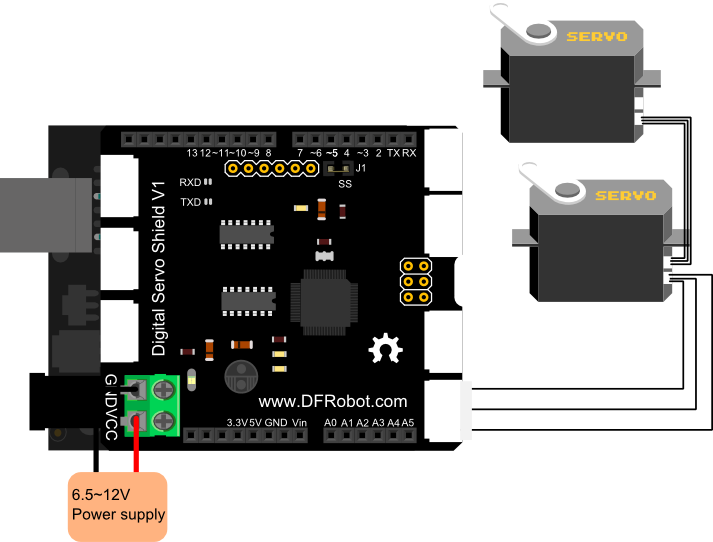
Sample Code:
/*
# This Sample code is to test the Digital Servo Shield.
# Editor : Leff
# Date : 2016-1-19
# Ver : 1.1
# Product: Digital Servo Shield for Arduino
# Hardwares:
1. Arduino UNO
2. Digital Servo Shield for Arduino
3. Digital Servos( Compatible with AX-12,CDS55xx...etc)
4. Power supply:6.5 - 12V
# How to use:
If you don't know your Servo ID number, please
1. Open the serial monitor, and choose NewLine,115200
2. Send command:'d',when it's finished, please close the monitor and re-open it
3. Send the command according to the function //controlServo()//
*/
#include "SPI.h"
#include "ServoCds55.h"
ServoCds55 myservo;
int servoNum = 1;
char inputCommand ; // a string to hold incoming data
boolean inputComplete = false;
void setup () {
Serial.begin (115200);
myservo.begin ();
}
void loop () {
serialEvent();
if (inputComplete) {
Serial.print("Your command is: "); Serial.println(inputCommand); Serial.println("");
controlServo(inputCommand);
// clear the command:
inputCommand = 0;
inputComplete = false;
}
}
void serialEvent() {
while (Serial.available()) {
char inChar = (char)Serial.read();
if (inChar == '\n') {
inputComplete = true;
break;
}
inputCommand += inChar;
}
}
void controlServo(char val) {
switch (val) {
case 'p':
myservo.write(servoNum, 300); //ID:1 Pos:300 velocity:150
delay(3000);
myservo.write(servoNum, 0); //ID:1 Pos:0 velocity:150
break;
case 'v':
myservo.setVelocity(200);// set velocity to 100(range:0-300) in Servo mode
break;
case 'm':
myservo.rotate(servoNum, 150); // Anti CW ID:1 Velocity: 150_middle velocity 300_max
delay(2000);
myservo.rotate(servoNum, -150); // CW ID:1 Velocity: -150_middle velocity -300_max
delay(2000);
myservo.rotate(servoNum, 0); //Stop
myservo.Reset(servoNum); //Only Dynamixel AX need this instruction while changing working mode
//CDS55xx don't need this, it can switch freely between its working mode
break;
case 'r':
myservo.Reset(servoNum);//Restore ID2 servo to factory Settings ( ID:1 Baud rate:1000000)
break;
// case 'i':
// myservo.SetID(2,1);//ID:1 newID:2
// break;
case 'd': //Reset servo to ID>>servoNum. If you don't know your Servo ID, please send "d".
Serial.print("Please wait..");
for (int buf = 0; buf < 255; buf++) {
myservo.SetID(buf, servoNum);
if (buf % 50 == 0) Serial.print(".");
}
delay(2000);
Serial.println(""); Serial.println("Please close the monitor and re-open it to play your servo! ");
break;
default:
Serial.println("Please give me an available instruction:");
Serial.println(" Servo mode: p_Set position; v_Set velocity.");
Serial.println(" Motor mode: m_Rotate; v_Set velocity.");
Serial.println(" Others: r_Reset servo to factory settings; i_Change servo ID."); Serial.println("");
}
}