Out Of Stock
Description
The UGV02 series presents a robust 6-wheel drive (6x4) mobile robot chassis known for its remarkable off-road capabilities and exceptional shock-absorption performance. Designed with open-source code support for secondary development, this platform offers compatibility with various host computers such as Raspberry Pi, Jetson Nano, Jetson Orin Nano, and more. It facilitates seamless communication between the host computer and the ESP32 slave computer via the serial port.
Features:
-
Versatile Compatibility: The UGV02 is compatible with a range of host computers, including Raspberry Pi, Jetson Nano, Jetson Orin Nano, and more. It enables seamless communication between the host and the ESP32 slave computer via the serial port.
-
6 Wheels & 4WD Design: The innovative 6-wheel drive (6x4) design maximizes ground contact and load capacity while providing robust power for various applications.
-
Integrated UPS: The chassis incorporates a 3S UPS power supply module that supports three 18650 Li batteries (in series, batteries not included). This setup ensures uninterrupted power for the robot and enables simultaneous charging and power output.
-
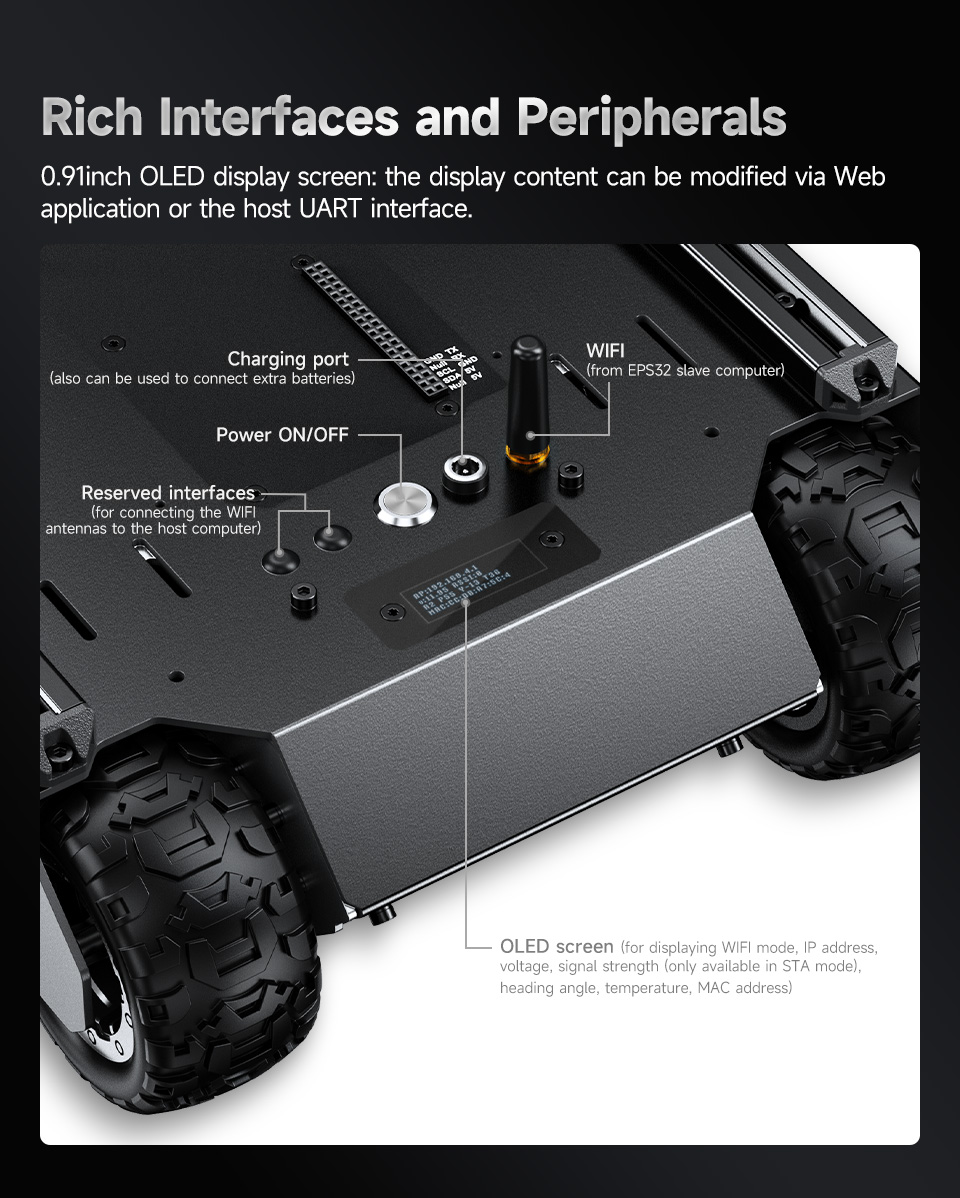
Multi-Functional Driver Board: Featuring a built-in multi-functional robot driver board based on ESP32, the UGV02 includes onboard WIFI and Bluetooth support. It's capable of driving serial bus servos, outputting PWM signals, and expanding TF card slot capabilities.
-
Terrain-Adaptive Tires: The chassis is equipped with flexible rubber tires that effectively dampen the impact of complex terrains, making it suitable for heavy loads, shock absorption, and off-road navigation.
-
Additional Rails: This chassis comes with two 1020 European standard profile rails, opening up possibilities for secondary development and customization.
Specifications:
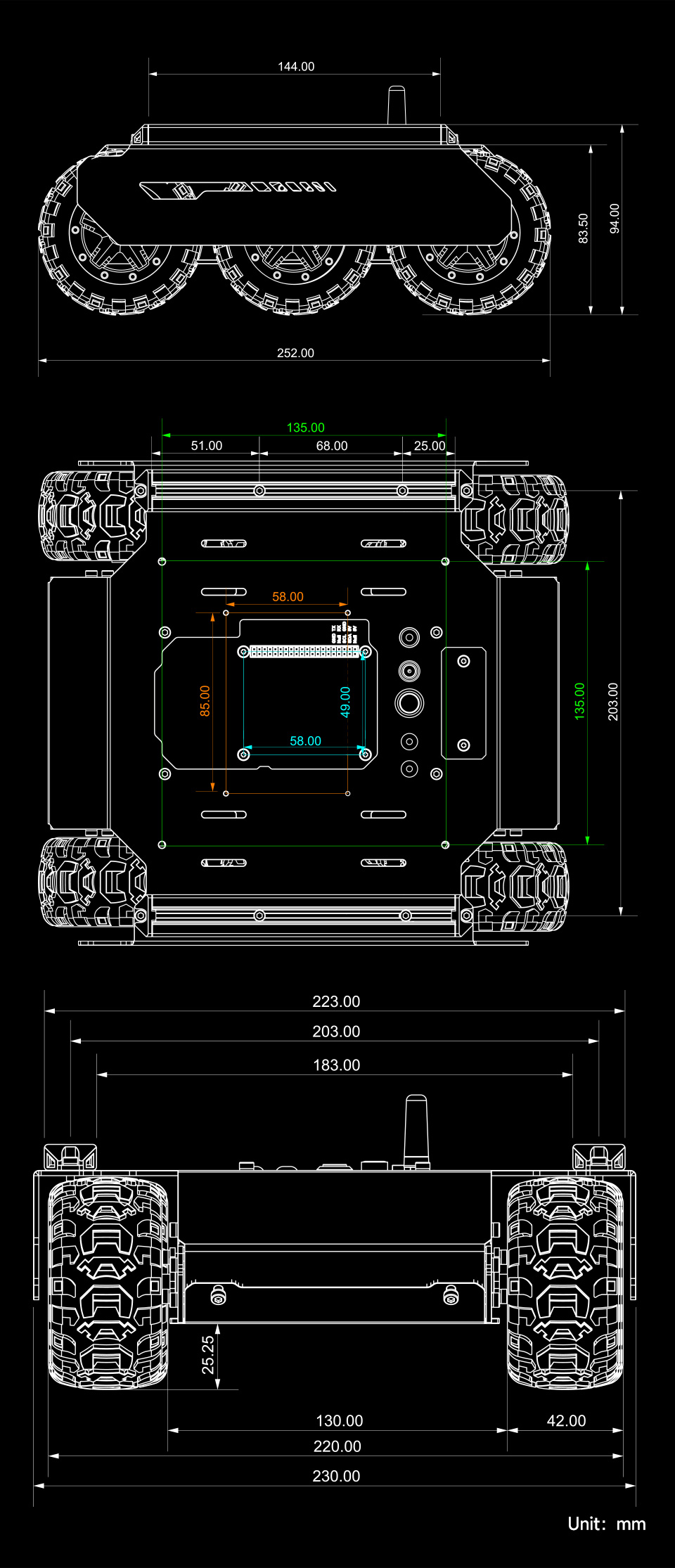
- Outline Dimensions: 252 x 230 x 94mm
- Tire Material: Nylon wheel hub, rubber tire
- Chassis Height: 25mm
- Rail Center Distance: 203mm
- Tire Width: 42mm
- Running Speed: 0.05~0.41m/s
- Tire Diameter: 80mm
- Number of Driving Wheels: 4
- Number of Wheels: 6
- Body Material: 2mm (thickness) 5052 Aluminum Alloy
- Weight: 2kg
- Vertical Obstacle Ability: 40mm
- Driving Payload: 4kg
- Climbing Ability: 22°
- Battery Support: 18650 Lithium battery x 3 (Not Included)
- Minimum Turning Radius: 0m (In-situ Rotation)
- Charging Time: 1.5h
- Battery Life: 45min (full power continuous output)
- Motor Power: 5W x 4
- Upper Surface Area: 37864mm²
- Communication Interface: UART / Serial bus servo interface / I2C
Product Images:




Connection Options:
-

-
Connect to Jetson Orin Nano
-

-
Connect to Raspberry Pi 4B
-
-
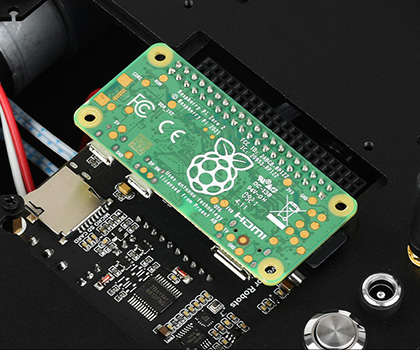
Connect to Raspberry Pi Zero
Additional Information:
For more details about the slave computer driver board, please refer to the General-Driver-for-Robots product page.
Product Showcase:

Dimensions: