Out Of Stock
Description
Force-Sensitive Flexible Bend Sensor 2.2 Inches
A Force-Sensitive Flexible Bend Sensor 2.2 inches is a type of sensor that can detect and measure changes in force, pressure, or bending. It is flexible and can be easily bent to fit a variety of shapes and sizes. This sensor is designed to be sensitive to even small changes in force or pressure, making it useful for a range of applications, such as robotics, wearables, and medical devices. Its compact size of 2.2 inches makes it suitable for use in small and tight spaces.
Package Includes:
- 1 x Force-Sensitive Flexible Bend Sensor 2.2 inches
Features:
- Force-sensitive: The sensor is designed to detect and measure changes in force or pressure.
- Flexible: The sensor is flexible and can be easily bent to fit a variety of shapes and sizes.
- Bend-sensitive: The sensor can also detect changes in bending or curvature.
- Compact size: The sensor is only 2.2 inches in size, making it suitable for use in small and tight spaces.
- Sensitive to small changes: The sensor is designed to be sensitive to even small changes in force or pressure.
- Wide range of applications: The sensor can be used in a variety of applications, such as robotics, wearables, and medical devices.
- Easy to use: The sensor may be easy to use and integrate into existing systems.
Description:
The Force-Sensitive Flexible Bend Sensor 2.2 Inches is a type of sensor that is designed to detect and measure changes in force, pressure or bending. The sensor is flexible and can be easily bent to fit a variety of shapes, making it suitable for use in a wide range of applications. The sensor is also designed to be compact in size, with a length of only 2.2 inches, making it ideal for use in small and tight spaces. This type of sensor can detect changes in force or pressure by measuring the electrical resistance of a conductive material that changes when subjected to force. In addition to being sensitive to changes in force or pressure, The sensor is designed to be sensitive to even small changes in force or pressure, making it suitable for use in applications that require precise measurements. For example, it can be used in robotics to measure the force exerted by a robot arm or gripper. It can also be used in medical devices to measure the force exerted by a medical instrument or to monitor the pressure exerted by a prosthetic device. The sensor is easy to use and can be integrated into existing systems with minimal effort. It can be connected to a microcontroller or other device that can process and analyze the sensor data. applications.
Principle of Work:
The flex sensor works based on a change in resistance as it is bent or flexed. The sensor is made up of a flexible substrate, which is usually a thin film of polymer material, and two metal pads attached at either end of the substrate. When the sensor is straight, the distance between the metal pads is fixed, and the resistance between them is a known value, which is typically around 25K ohms. However, when the sensor is bent, the distance between the metal pads changes, causing the resistance between them to increase or decrease. The change in resistance is due to the piezoresistive effect. As the substrate is bent or flexed, the distance between the metal pads changes, which in turn changes the distance between the conductive particles in the substrate. This change in distance affects the flow of current through the substrate, causing a change in resistance. The amount of resistance change depends on the degree of bending or flexing. A small bend may cause only a small change in resistance, while a larger bend may cause a significant change in resistance. The bend resistance range of the flex sensor varies from 45K to 125K Ohms depending on the degree of bend. The flex sensor can be connected to a microcontroller or other device that can measure the changes in resistance and interpret them as a bending or flexing motion. This makes the sensor suitable for use in a wide range of applications, including robotics, medical devices, gaming controllers, and many others.
Pinout of the Module:
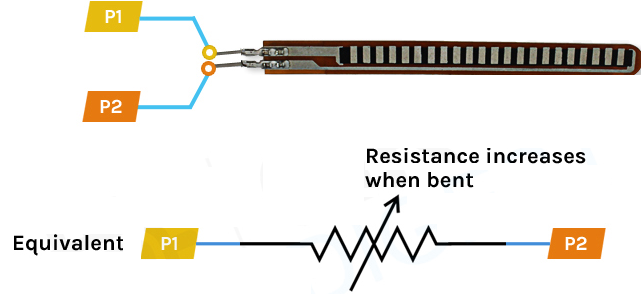
The flex sensor typically has two pins, which are labeled P1 and P2. P1 is connected to one end of the resistor inside the flex sensor, and P2 is connected to the other end of the resistor. When the flex sensor is bent or flexed, the length of the resistor inside the sensor changes, which in turn changes the resistance between P1 and P2. This change in resistance is detected by the microcontroller and can be used to calculate the degree of bending or flexing.
In terms of functionality, the flex sensor can be thought of as a variable resistor, similar to a potentiometer. Like a potentiometer, the flex sensor's resistance changes in response to a physical stimulus (bending or flexing), and this change can be used to control an electrical circuit. However, there are some differences between the flex sensor and the potentiometer. For example, the flex sensor is a passive device, which means it does not require an external power supply to operate. In contrast, a potentiometer usually requires a power source to operate. Additionally, the flex sensor's resistance varies based on the degree of bending or flexing, whereas a potentiometer's resistance varies based on the position of the wiper. Despite these differences, both the flex sensor and potentiometer are useful tools for controlling electrical circuits and are commonly used in a wide range of applications.
Applications:
- Robotics: Flex sensors can be used to detect the bending or flexing of robotic arms or other robot components.
- Medical devices: Flex sensors can be used to monitor the movement of limbs and joints in physical therapy or rehabilitation applications.
- Gaming controllers: Flex sensors can be used in gaming controllers to detect the movement of the user's hands or fingers.
- Wearable technology: Flex sensors can be integrated into wearable technology, such as smart clothing or fitness trackers, to monitor body movements and activity.
- Musical instruments: Flex sensors can be used to detect the bending of strings or other instrument components, allowing for new forms of expression and control.
- Automotive industry: Flex sensors can be used to detect the bending or deformation of car body parts or suspension systems, enabling real-time feedback to the driver or maintenance personnel.
- Virtual reality: Flex sensors can be used in virtual reality applications to detect the movement of the user's hands or fingers, enabling more immersive and intuitive interaction with the virtual environment.
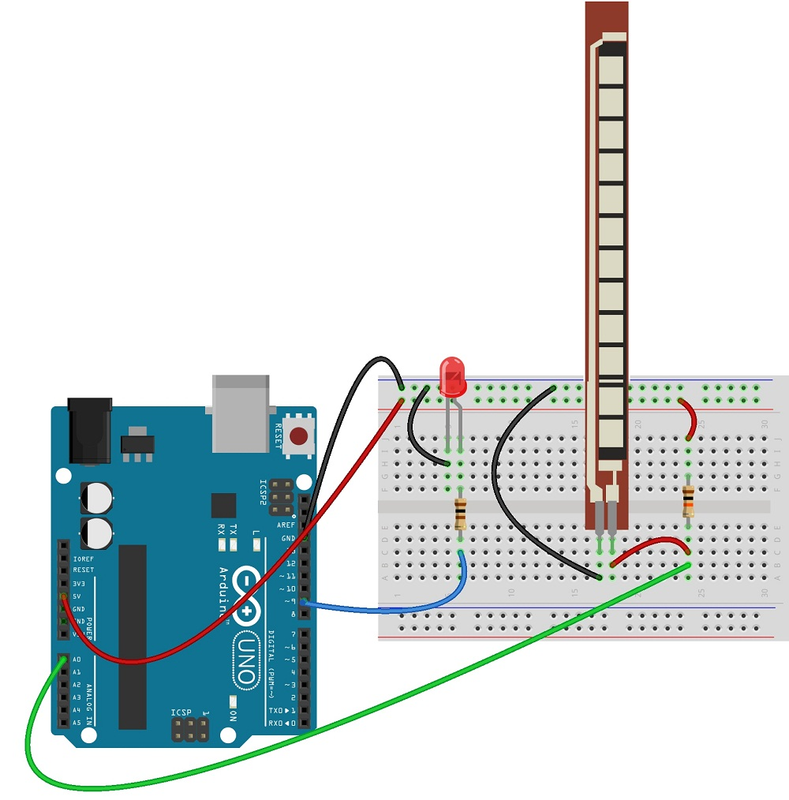
Circuit:
you will need a 10k resistor to connect the sensor to the Arduino on pin A0 as you see in the schematic and a 220 or 330ohm resistor for the LED connected to pin 9 with PWM.
Library:
Nn library is needed for this items to work.
Code:
example Arduino code for controlling the brightness of an LED based on the bending angle of a flex sensor connected to pin A0
// Define the flex sensor pin and LED pin
const int flexPin = A0;
const int ledPin = 9;
void setup() {
// Set the LED pin as an output
pinMode(ledPin, OUTPUT);
// Begin serial communication
Serial.begin(9600);
}
void loop() {
// Read the analog value of the flex sensor
int flexValue = analogRead(flexPin);
// Map the flex value to a range between 0 and 255 for the LED brightness
int ledValue = map(flexValue, 0, 1023, 0, 255);
// Set the LED brightness
analogWrite(ledPin, ledValue);
// Print the flex value to the serial monitor for debugging
Serial.println(flexValue);
// Wait a short amount of time before repeating the loop
delay(10);
}
- In this code, we first define the flex sensor pin and LED pin using the
constkeyword. In thesetup()function, we set the LED pin as an output and begin serial communication. - In the
loop()function, we read the analog value of the flex sensor using theanalogRead()function, which returns a value between 0 and 1023. We then use themap()function to map this value to a range between 0 and 255, which represents the brightness of the LED. We set the LED brightness using theanalogWrite()function. - Finally, we print the flex sensor value to the serial monitor using the
Serial.println()function for debugging purposes, and wait a short amount of time using thedelay()function before repeating the loop.
Technical Details:
- Operating voltage of FLEX SENSOR: 0-5V.
- Can operate on LOW voltages
- Power rating: 1/2 Watt, 1 Watt (peak)
- Life: 1 million
- Operating temperature: -45ºC to +80ºC
- Flat Resistance: 25K Ω
- Resistance Tolerance: ±30%
- Bend Resistance Range:/45K to 125K Ohms(depending on bend)
Resources:
Comparisons:
While both a flex sensor and a force sensor can measure the bending or deformation of an object, they are designed for different purposes and have some key differences:
- Working principle: A flex sensor changes its resistance as it is bent or flexed, while a force sensor changes its resistance or voltage output in response to an applied force or pressure.
- Range: Flex sensors are typically used to measure small changes in bending or curvature, while force sensors are designed to measure larger forces or pressures.
- Sensitivity: Flex sensors tend to be more sensitive to changes in bending, while force sensors are more sensitive to changes in applied force or pressure.
- Applications: Flex sensors are commonly used in applications where the bending or curvature of an object needs to be measured, such as in robotics or wearable technology. Force sensors are used in applications such as automotive or industrial settings where measuring force or pressure is important for safety or quality control.
- Shape: Flex sensors are usually long and thin, resembling a strip or ribbon, while force sensors can take on a variety of shapes and sizes depending on the application.
Overall, while both types of sensors can be used to measure deformation or pressure, their differences in working principle, range, sensitivity, and applications make them better suited for different types of tasks.