AED 7.35
Description
Tilt sensors can detect orientation and inclination. They are compact, affordable, low-power, and simple to use. They will not wear out if used properly. Because of their simplicity, they are popular for toys, gadgets, and appliances. They are also known as "mercury switches," "tilt switches," or "rolling ball sensors" for obvious reasons.
Package Includes:
- 1 x Tilt Shock Sensor SW-18020P
Features:
- It has a supply voltage range from 3.3V to 5V.
- It gives the TTL output.
- The sensor draws a minimum current of 25mA.
- The sensor is easy to interface with microcontrollers.
- Cheap and reliable
- It has a great durability rate.
Description:
You can identify orientation or inclination with tilt sensors. They are lightweight, affordable, low-power, and simple to use. They won't deteriorate with good use. They are popular for toys, technology, and appliances because of their simplicity. For apparent reasons, they are also sometimes referred to as "mercury switches," "tilt switches," or "rolling ball sensors." They are often created by placing a conductive free mass, such as a ball rolling or a blob of mercury, inside a hollow of some kind (although not invariably cylindrical). Two conducting devices are present at the cavity's one end (poles). The mass rolls onto the poles and shorts them when the sensor is positioned so that end is downward, acting as a switch throw.
Principle of Work:
Typically, a metal tube with a small ball that rolls inside it makes up a ball tilt sensor. Two conducting devices are at the cavity's one end (poles). The sensor is made to allow the ball to roll and make or break an electrical connection with just the right amount of tilt. The ball touches the poles and creates an electrical connection when the sensor is upright. The ball rolls off the poles when the sensor is tilted, breaking the connection.

Pinout of the Module:
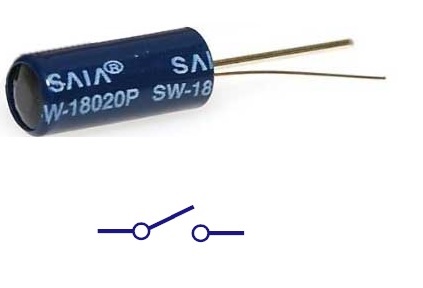
you can work with the tilt sensor as a switch so you can connect its legs interchangeably
Applications:
- Robotics makes extensive use of it.
- It can also be applied to automobiles.
- to determine the direction.
- to be aware of the desire.
Circuit:
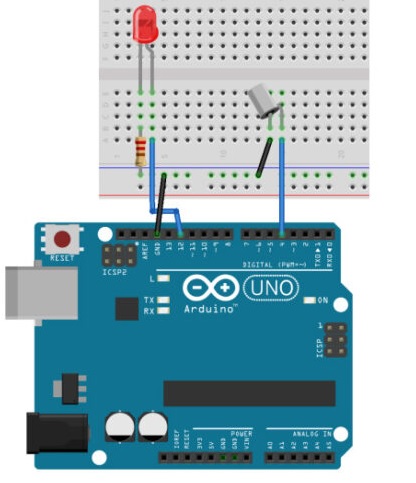
Assemble the Tilt Sensor using the Arduino UNO by connecting an LED to pin 12 with a 220ohm resistor and connecting the sensor to the pin 4. Now, copy and paste the code into your Arduino IDE. The code is then uploaded to Arduino. To see the glowing LED, tilt and move the sensor.
Library:
No Library is needed for this module to function
Code:
The input sensor pin and output LED pin that are connected to the Arduino pins has been defined. Then, by declaring the variable LastTiltState, we have shown that the sensor's previous stage was high. Next, we must specify the variables debounceDelay and lastdebounce time.
We have specified the sensor pin as the Arduino's input in the void setup. Led is also an output. Additionally, we initialized the serial monitor there.
We have defined the function digitalRead() in the void loop to examine the sensor reading. The sensor will reset the debouncing time if it detects a value identical to the previous lastTiltState stated above, as long as the requirement is met.
additionally returns the milliseconds value. The condition has been created since then. The lastTiltState becomes the sensorValue if the condition is verified. The lastTiltState is also taken by the LED pin. To display the sensor value on the serial monitor, use the Serial. println command.
int ledPin = 12;
int sensorPin = 4;
int sensorValue;
int lastTiltState = HIGH; // the previous reading from the tilt sensor
// the following variables are long's because the time, measured in miliseconds,
// will quickly become a bigger number than can be stored in an int.
long lastDebounceTime = 0; // the last time the output pin was toggled
long debounceDelay = 50; // the debounce time; increase if the output flickers
void setup(){
pinMode(sensorPin, INPUT);
digitalWrite(sensorPin, HIGH);
pinMode(ledPin, OUTPUT);
Serial.begin(9600);
}
void loop(){
sensorValue = digitalRead(sensorPin);
// If the switch changed, due to noise or pressing:
if (sensorValue == lastTiltState) {
// reset the debouncing timer
lastDebounceTime = millis();
}
if ((millis() - lastDebounceTime) > debounceDelay) {
// whatever the reading is at, it's been there for longer
// than the debounce delay, so take it as the actual current state:
lastTiltState = sensorValue;
}
digitalWrite(ledPin, lastTiltState);
Serial.println(sensorValue);
delay(500);
}
Technical Details:
- Maximum working voltage (Vmax): 12V
- Maximum current (Imax): less than 5mA
- Open circuit resistance: more than 10 Mega Ohms
- On resistance: less than 5 ohms
- Ambient temperature: less than 100℃.
- Life expectancy: 5,00,000 times
- Response time: 2ms
Resources:
Comparisons: