Out Of Stock
Description
The US-015 Ultrasonic Distance - Measurement Module detects distances of up to 4m (700cm stable). It is compatible with any microcontroller, including Arduino. It has four pins, two for 5v power (VCC - GND) and two for data. It can be used in a wide range of projects, including robots and other forms of automation. It is also widely used in education due to its ease of use. It is very similar to the HC-SR04 module, but it differs in range, resolution, and frequency.
Package Includes:
- 1x Ultrasonic US-015 Module Distance Sensor
Features:
- Supply voltage: 5V (DC).
- Working Current: 3mA
- Output: 0 – 5V (Output high when obstacle detected in range).
- Beam Angle: Max 15 degrees.
- Distance: 1cm – 700cm.
- Accuracy: 1mm
- PinOut: 4 PIN Sensing
- Advantages: Better accuracy than HCSR04
- Communication: Positive TTL pulse.
Description:
An ultrasonic sensor can determine the distance between a robot and a target. The sensor is used in many robotic projects to detect a wall in a maze and provides information to the MCU so that the robot can rotate to find a way out. The most commonly used device is the US-015 ultrasonic distance sensor. The US-015 ultrasonic distance sensor gives data to calculate the distance to an object using sonar. This US-015 ultrasonic module has a non-contact ranging range of 2-700cm, a wide voltage input range of 5V, and a static power consumption of less than 3mA. , very stable and reliable.
Principle of Work:
The ultrasonic sensor operates on the same principles as the SONAR and RADAR systems, which are used to calculate the distance to an object. The high-frequency sound (ultrasound) waves are produced by an ultrasonic sensor. When this ultrasound strikes an object, it reflects as an echo, which the receiver detects. We can calculate the distance by measuring the time it takes for the echo to reach the receiver. This is the fundamental operation of the Ultrasonic module for measuring distance.
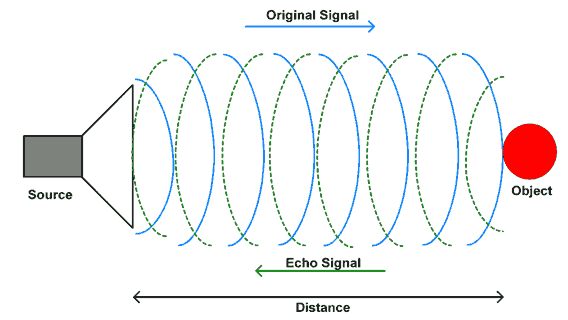
The US-015-04 has an ultrasonic transmitter, receiver, and control circuit. We must issue a trigger pulse to the ultrasonic module US-015 in order for it to generate ultrasound at a high frequency. It raises the echo pin after producing ultrasound, i.e. 8 pulses. The echo pin remains high until the echo sound is not received. As a result, the width of the echo pin will be the time it takes for sound to travel to the object and return. We can calculate distance once we have the time and the speed of sound. The US-015 has a measurement range of 2 cm to 700 cm.
At 20°C, the speed of sound is approximately 343 m/s (0.034 cm/s). Assume that the time interval between sending and receiving sound waves is 2000 microseconds. The distance traveled by sound waves is calculated by multiplying the speed of sound by the time the waves traveled.
Distance = Time x Speed
However, this is not the desired outcome. Because sound waves travel from the sensor to the object and back, the distance between the sensor and the object is only half. As a result, divide the result by two.
Distance (cm) = Sound speed (cm/s) / Time (s)
Pinout of the Board:

| VCC | Powers the sensor (5V) |
| Trig | Trigger Input Pin |
| Echo | Echo Output Pin |
| GND | Common GND |
Applications:
- Anti-Collision Detection.
- People Detection.
- Presence Detection.
- Box Sorting using a Multi-Transducer System.
- Easy Control of Trash Collection Vehicles.
- Pallet Detection with Forklifts.
- Bottle Counting on Drink Filling Machine
- Brushless DC electric motors detect the position of the permanent magnet.
- Computer printers to detect missing paper and open covers.
Circuit:
The module's Ground and VCC pins must be connected to the Arduino Board's Ground and 5 volts pins, respectively, and the trig and echo pins to 11 -12 Digital I/O pin on the Arduino Board.
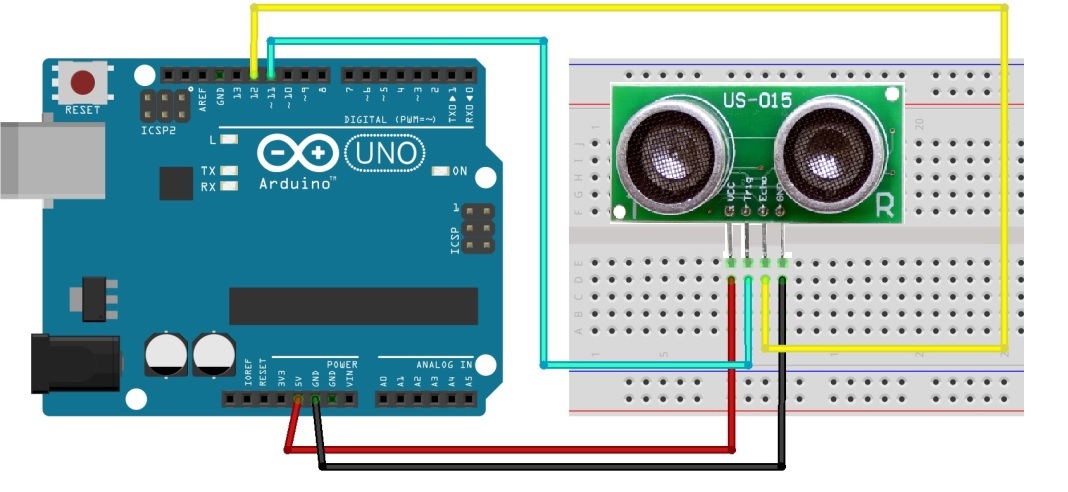
| Ultrasonic Sensor | Arduino |
| VCC | 5V |
| Trig | Pin 11 |
| Echo | Pin 12 |
| GND | GND |
Library:
You need to install the below NewPinglibrary. Just download the below library and open Arduino IDE. Now go to Sketch > Include Library > Add . Zip Library.
Download here: Download NewPing Library
Code:
we will type the distance of an object on the Serial Monitor with this code just upload it and aim the sensor to an object and watch your Serial Monitor.
#include "NewPing.h"
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(115200);
}
void loop() {
delay(50);
Serial.print("Ping: ");
Serial.print(sonar.ping_cm());
Serial.println("cm");
}
Technical Details:
- Operating Voltage: DC 5V
- Current: 2.2mA
- Range: 2 - 700cm
- Sensing Angle: less than 15deg
- Accuracy: 0.1cm+-5%
- Size (mm): 45 (L) x 20 (W) x 16 (H)
- Weight: 10 g
Resources:
Comparisons:
The primary distinction between a PIR sensor and an ultrasonic sensor is that a PIR sensor detects the presence of an object by sensing the difference between heat emitted by the movement of the object and heat emitted by the background, whereas an ultrasonic sensor detects the presence of an object by emitting ultrasonic sound waves and measuring the speed at which the waves return. A PIR sensor is an electronic sensor that can measure the IR light emitted by objects in its field of view, whereas an ultrasonic sensor can measure the distance to an object using ultrasonic sound waves. ultrasonic Tends to consume lower current/power than PIR, but still ultrasonic has a limited detection range in comparison to PIR