AED 109.20
Description
The Cytron Maker Pi RP2040 is a versatile robot controller board featuring the first microcontroller designed by Raspberry Pi, the RP2040. This board is equipped with dual-channel DC motor drivers, servo motor ports, and multiple Grove I/O connectors, making it an ideal choice for DIY robotics and motion control projects. It allows users to explore the new RP2040 chip while building robots.
Features
Powered by Raspberry Pi RP2040
- Processor: Dual-core Arm Cortex-M0+
- Internal RAM: 264KB
- Flash Memory: 2MB
- Specifications: Same as Raspberry Pi Pico
Robot Controller Board
- Servo Motors: 4 ports
- DC Motors: 2 channels with quick test buttons
Versatile Power Circuit
- Power Selection: Automatic between USB 5V, LiPo (1-cell), or Vin (3.6-6V)
- Battery Charger: Built-in 1-cell LiPo/Li-Ion charger with protection features
- Switch: Power on/off
Additional Features
- Status LEDs: 13 for GPIO pins
- Buzzer: 1x Piezo with mute switch
- Buttons: 2x push buttons
- RGB LEDs: 2x (Neopixel)
- Grove Ports: 7x flexible I/O options (digital, analog, I2C, SPI, UART)
- CircuitPython: Preloaded
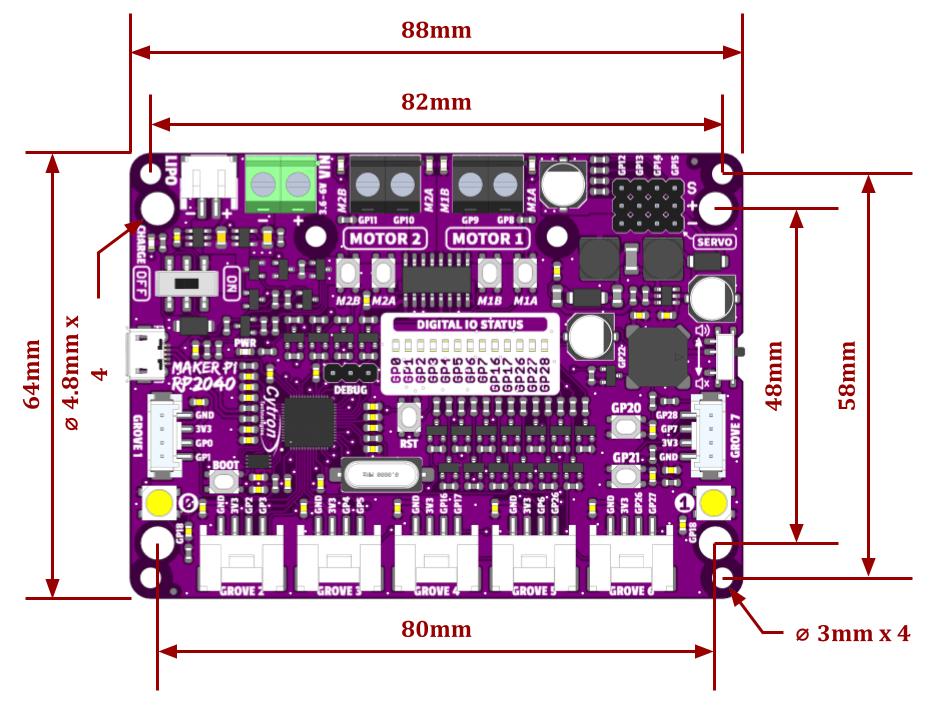
- Mounting Holes:
- 4x 4.8mm (LEGO® pin compatible)
- 6x M3 screw holes
Specifications
- Microcontroller: Raspberry Pi RP2040
- Processor: Dual-core Arm Cortex-M0+
- RAM: 264KB
- Flash Memory: 2MB
- Motor Ports: 4x Servo, 2x DC
- Power Input: USB 5V, LiPo (1-cell), Vin (3.6-6V)
- Status LEDs: 13
- Piezo Buzzer: 1
- Push Buttons: 2
- RGB LEDs: 2
- Grove Ports: 7
- Mounting Holes: 4x 4.8mm, 6x M3
Applications
The Maker Pi RP2040 is suitable for:
- DIY robotics projects
- Motion control applications
- Educational purposes in learning programming and electronics
- Prototyping and experimentation with the RP2040 microcontroller
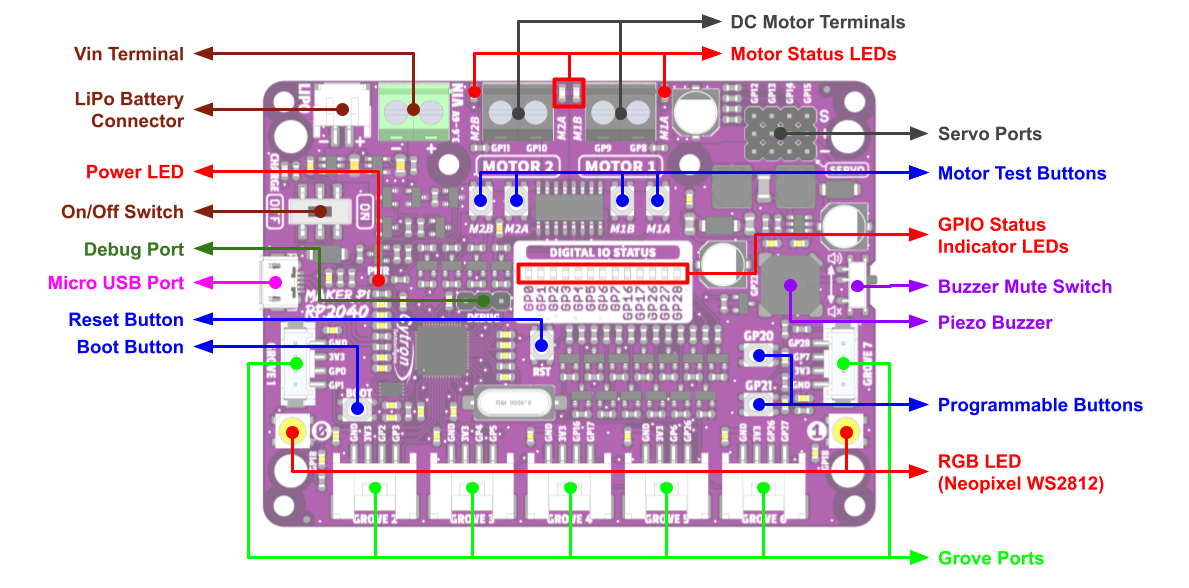
Pinout
|
Function |
Description |
|
Vin Terminal |
Connect to any power source within 3.6 - 6V. |
|
LiPo Battery Connector |
Connect to Single Cell LiPo / Li-Ion Battery The battery is rechargeable via USB.
|
|
Power LED |
Turn on when powered up. |
|
On/Off Switch |
Turn on/off the power. |
|
Debug Port |
Debugging port of the RP2040. |
|
Micro USB Port |
Used for upload programs from PC. |
|
Reset Button |
Press to reset the RP2040. |
|
Boot Button |
Press and hold this button while resetting the RP2040 will enter the bootloader mode. Used to load the Micropython/Circuitpython or custom C/C++ firmware. |
|
Function |
Description |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Grove Ports |
Connect to external Grove modules.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
RGB LEDs (WS2812) |
User programmable WS2812B RGB LED. Connected to GP18. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Programmable Buttons |
Accessible from the user program. Connected to GP20 and GP21 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Piezo Buzzer |
Can be used to play tone or melody. Connected to GP22. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Buzzer Mute Switch |
Used to mute the piezo buzzer. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
GPIO Status LEDs |
LED indicators for RP2040 GPIOs on Grove Ports. Turn on when the GPIO state is high. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Motor Test Buttons |
Press to test the functionality of the motor driver. Motor will run at full speed.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Servo Ports |
Connectors for 4 x RC servo motors. Signal is connected to GP12, GP13, GP14 and GP15. V+ voltage is equal to power source voltage. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Motor Status LEDs |
Turn on when the motor is running.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
DC Motor Terminals |
Connect to the motor terminal. Motor voltage at full speed is equal to power source voltage. Motor direction is dependent on the polarity.
|
Motor Driver Truth Table:
|
Input A (GP8 / GP10) |
Input B (GP9 / GP11) |
Output A (M1A / M2A) |
Output B (M1B / M2B) |
Motor |
|
Low |
Low |
Low |
Low |
Brake |
|
High |
Low |
High |
Low |
Forward* |
|
Low |
High |
Low |
High |
Backward* |
|
High |
High |
Hi-Z (Open) |
Hi-Z (Open) |
Coast |
Dimension:
Resources:
- Getting Started with Maker Pi RP2040 & Example Code
- Maker Pi RP2040 Datasheet
- Maker Pi RP2040 Schematic
- Maker Pi RP2040 VS. Maker Pi Pico comparison table
- CircuitPython for Maker Pi RP2040
- 3D CAD
- Getting Started with RP2040 (Raspberry Pi official page)
- RP2040 Datasheet
Package Includes
- 1x Maker Pi RP2040
- 4x Grove to Female Header Cable
- 1x Mini Screwdriver
- 1x Silicone Rubber Feet (Pack of 4)