AED 9.45
Description
The sensor module is a versatile light sensor that utilizes infrared technology. It detects obstacles in front of it and outputs a low-level digital signal when it encounters an obstacle. The detection range can be adjusted with a potentiometer and has an effective distance of 2 to 30 cm. The module operates on 3.3 to 5V and has a 35° detection angle. It can be connected to a microcontroller or used to drive a 5V relay, and is equipped with the stable LM393 comparator. The circuit board is compact and easy to install with 3mm screw holes.
Package Includes:
- 1 x IR Infrared Barrier Sensor, Obstacle Avoidance RobotDYN
Features:
- Infrared transmitting and receiving tubes for detecting obstacles and reflecting surfaces.
- A green indicator light that lights up when an obstacle is detected and a low-level digital signal is outputted.
- The detection range can be adjusted with a potentiometer with a range of 2 to 30 cm.
- The operating voltage is 3.3 to 5V.
- The output port can be directly connected to a microcontroller IO port or used to drive a 5V relay.
- Stable performance with the LM393 comparator.
- Easy to install with 3mm screw holes.
- Suitable for a variety of applications such as robot obstacle avoidance, obstacle avoidance car, line counting, and black and white line tracking.
- Can be powered by 3 to 5V DC power.
- A red power indicator light that lights up when powered on.
- The potentiometer has been adjusted before shipment and should not be changed unless necessary.
- Digital output interface with small plate (0 and 1).
Description:
The sensor module is an adaptable light sensor that uses infrared transmitting and receiving tubes. When the infrared emitted by the transmitting tube encounters an obstacle, the reflected infrared is received by the receiving tube, and after processing by the comparator circuit, the green indicator lights up and a low-level digital signal is outputted. The detection range can be adjusted with a potentiometer, and the effective distance range is 2 to 30 cm. The module operates on a voltage of 3.3 to 5V and has a 35° detection angle. The module's output port can be connected directly to a microcontroller IO port or used to drive a 5V relay, and it is stable with the LM393 comparator. The circuit board is easy to install with 3mm screw holes and has a size of 3.2cm x 1.4cm. The potentiometer has been adjusted before shipment and should not be changed unless necessary.
Principle of Work:
the sensor module is based on infrared reflection detection. The module consists of a pair of infrared transmitting and receiving tubes. The transmitting tube emits a certain frequency of infrared, and when it encounters an obstacle, the reflected infrared is received by the receiving tube. The comparator circuit processes the signal and outputs a low-level digital signal through the OUT port. The green indicator on the circuit board lights up when an obstacle is detected. The detection range can be adjusted using the potentiometer, and the effective distance range is 2 to 30 cm. The module operates on a voltage of 3.3 to 5V and has a 35° detection angle. The comparator used in the circuit is the LM393, which ensures the stability of the module. The module is easy to assemble and can be widely used in applications such as robot obstacle avoidance, line counting, and black-and-white line tracking.
Pinout of the Module:
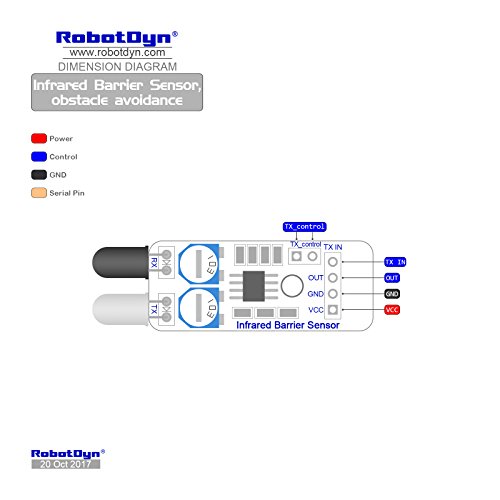
The sensor module has 4 pins: VCC, GND, OUT and TXIN.
-
VCC (Voltage Common Collector) pin is the positive supply voltage that is required for the module to operate. The voltage input should be between 3.3V to 5V.
-
GND (Ground) pin is the common ground for the module, it should be connected to the ground of the power supply.
-
OUT (Output) pin is the digital output interface, it outputs a low-level signal when the module detects an obstacle in front of the signal.
-
TXIN (Transmit Input) pin is used to control the infrared transmission, it is responsible for transmitting the infrared signals to detect obstacles.
Applications:
- Obstacle avoidance in robots
- Obstacle avoidance in cars
- Line counting
- Black and white line tracking
- Detection of objects based on their reflectivity and shape.
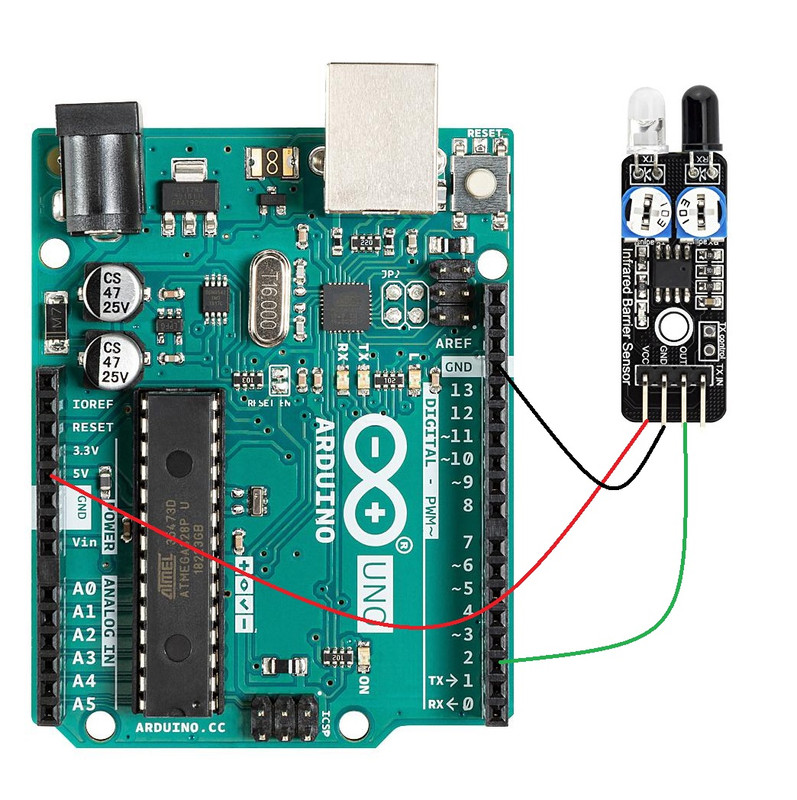
Circuit:
Library:
No need to install a library.
Code:
Arduino code for the last item, which is connected to pin 2 and gives a low output when triggered, and prints the output on the serial monitor:
const int sensorPin = 2;
void setup() { Serial.begin(9600); pinMode(sensorPin, INPUT); } void loop() { int sensorValue = digitalRead(sensorPin); Serial.println(sensorValue); if (sensorValue == LOW) { Serial.println("Obstacle detected"); } delay(100); }
the sensor is connected to digital pin 2, and the pinMode function sets the pin to input mode. The digitalRead the function is used to read the state of the pin, and if the sensor output is low (i.e., the obstacle is detected), the program prints "Obstacle detected" to the serial monitor. The delay is used to control the rate at which the sensor is read.
Technical Details:
- Detection range: 2 to 30 cm
- Detection angle: 35°
- Voltage: 3.3V to 5V DC
- Output port: Direct connection to a microcontroller IO port or to drive a 5V relay
- Comparator: LM393
- Circuit board size: 3.2cm x 1.4cm
- 3mm screw holes for easy installation
- Power indicator: Red LED
- Potentiometer: This can adjust the detection range, already adjusted before shipment, and should not be changed unless necessary.
Resources:
Comparisons:
The IR Infrared Barrier Sensor with 4 pins and the Obstacle Avoidance RobotDYN are similar in that they both use infrared technology to detect obstacles. However, the IR Infrared Barrier Sensor with 4 pins is designed to detect obstacles in a straight line, while the Obstacle Avoidance RobotDYN is designed to detect obstacles in all directions.
The modules based on TCRT5000 are also infrared obstacle detection sensors, but they work differently compared to the IR Infrared Barrier Sensor and the Obstacle Avoidance RobotDYN. TCRT5000 is a type of infrared sensor that consists of an infrared LED and a phototransistor. When an object blocks the path of the infrared light from the LED to the phototransistor, the output of the phototransistor changes, indicating the presence of an obstacle.